Projects
Topics of Projects - Table of Content
1. Microprocessors and Mechaincal Design: Coin Sorter
2. Computer-Aided Design: Reuleaux Machine
3. Design, Test, and Fabrication: Water Pump
4. Design: 3 lbs. BattleBot
5. Spacecraft Simulation: Drag vs. Altitude
6. Mars Sample Return Thermal Protection System Design
7. Design, Test, and Fabrication: 12 lbs. BattleBot
7. Combat Robotics at Cornell:
12 lbs. Combat Robot - Richard

.png)

As the lead of the Powertrain subsystem & member of the Kinetic subteam at Combat Robotics at Cornell,
I designed and manufactured a 12 lbs.
vertical spinner 2-wheel drive combat robot, Richard. Richard ranked 4th place at the Norwalk Havoc Robot League
competition (NHRL) on April 23, 2022, and got invited to the Champions Invite-only Competition in December 2022. Richard has a tank drive system, with an invertible design
and a passive/active Weapon subsystem.
This project started with preliminary research and brainstorming for different designs, CADing and speccing electronics & mechanical
components, manufacturing the metal parts and soldering the electronics, followed by
integration and testing in our very own Test Box that we fabricated. A report of this project, documented by my subteam, can be seen
here. Additionally, my senior design report regarding this project
can be viewed here.
6. Mars Sample Return Return Trajectory and
Thermal Protection
System Design


The Mars Sample Return Earth re-entry thermal protection system and trajectory were designed to minimize the overall system mass and complexity. Trajectory design and preliminary thermal analyses were conducted in MATLAB to establish trends before more detailed (though one-dimensional) analyses were conducted with open-source industry packages. Porous Microstructure Analysis (PuMA) and Porous material Analysis Toolbox based on OpenFOAM (PATO) were utilized to simulate the pyrolysis and ablasion during the reentry into Earth's atmosphere. From the detailed analysis it was determined that a moderately steep initial entry trajectory and a 5 cm thick PICA heat shield ensure that the heat shield bond line remains adequately cool as to ensure mission safety. A report of this project documented by my team and I can be seen here.
5. Investigating the Trade-off Between
Operating Altitude vs. Drag Compensation for
Maximizing Payload Mass of a Spacecraft


The overall objective of this project was to investigate the trade-off between operating altitude and drag compensation. This optimal operating altitude at low-Earth orbit maximizes Falcon 9’s payload volume. Based on computation in MATLAB verified with simulation in GMAT, an altitude on the order of 300km was suitable for maximizing the payload mass to be on the order of 9000kg. The desired mission duration and payload volume was estimated to be 5 years based on the application of an in-space manufacturing depot from research and discussions with the founder and CEO of Varda Space Industries. Research conducted on optimizing the spacecraft’s shape for low drag while maximizing volume resulted in a drag coefficient of 2.72. By investigating different propulsion systems’ performance parameters, the ion engine, QinetiQ T5, was selected as the best propulsion system for this missions because it offers an Isp of 3000 seconds while having a light mass of only 50kg. The full report of the project can be seen here.
4. 3 lbs. Combat Robot Design - Summer 2021 Project:
Pneumatic Rocky



Designed a complete ready-to-manufacture 3lb Combat Robot with penumatic punch weapon system, including final CAD assembly, parts lists, cost analysis, etc. which can be viewed here. This 2-person project went through two rounds of design reviews and multiple revisions, in addition to a final full-team presentation for Combat Robotics at Cornell to ensure the best design for manufacturability and effectiveness in the battle. Some of the features of Rocky include invertibility of the robot body, passive/active weapon system, impactful pneumatic punch, and more! I really enjoyed working on this project as it gave me a lot of experience with design for manufacturing, understanding robots and their components, while maintaining a weight limit goal, which was 3 lbs in this case.
3. Reciprocating Water Pump:
4 Piston-Cylinder Assemblies, Double Scotch Yoke




Collaborated with a team of seven mechanical engineers to design and manufacture a 4 piston-cylinder water pump. Not only that our pump met
the requirement of 1 liter per minute outflow, but we broke the record by having 8.6 liters per minute. A test run of this pump can be seen
here.
For more details about this project please refer to the project report.
Some important lessons/skills I learned/improved upon during this project include:
leading the assembly as the Front-End Integrator, significance of dimensioning and tolerancing, material choice, having a plan for assembling the final product, coming to a consensus by being open to others' ideas
and having regular/effective communication, machining using Lathe and Mill, parts drawings, CAD. This has been one of my favorite projects by far as a mechanical engineering student.
2. Reuleaux Machine Design


Reproducing the design of F05 Wedding Chamber Crank Mechanism, from the Cornell Reuleaux Collection of Kinematic Models. This project included drafting preliminary sketches of the mechanism, understanding the motion of the moving parts, and finally transforming everything digitally into CAD. During this design project, I was familiarized with new CAD features such as different types of joints, contact sets, motion study, exploded view, parts drawing, and rendering. I really enjoyed working with Fusion 360 to reproduce this design digitally.
1. Coin Sorter/Counter
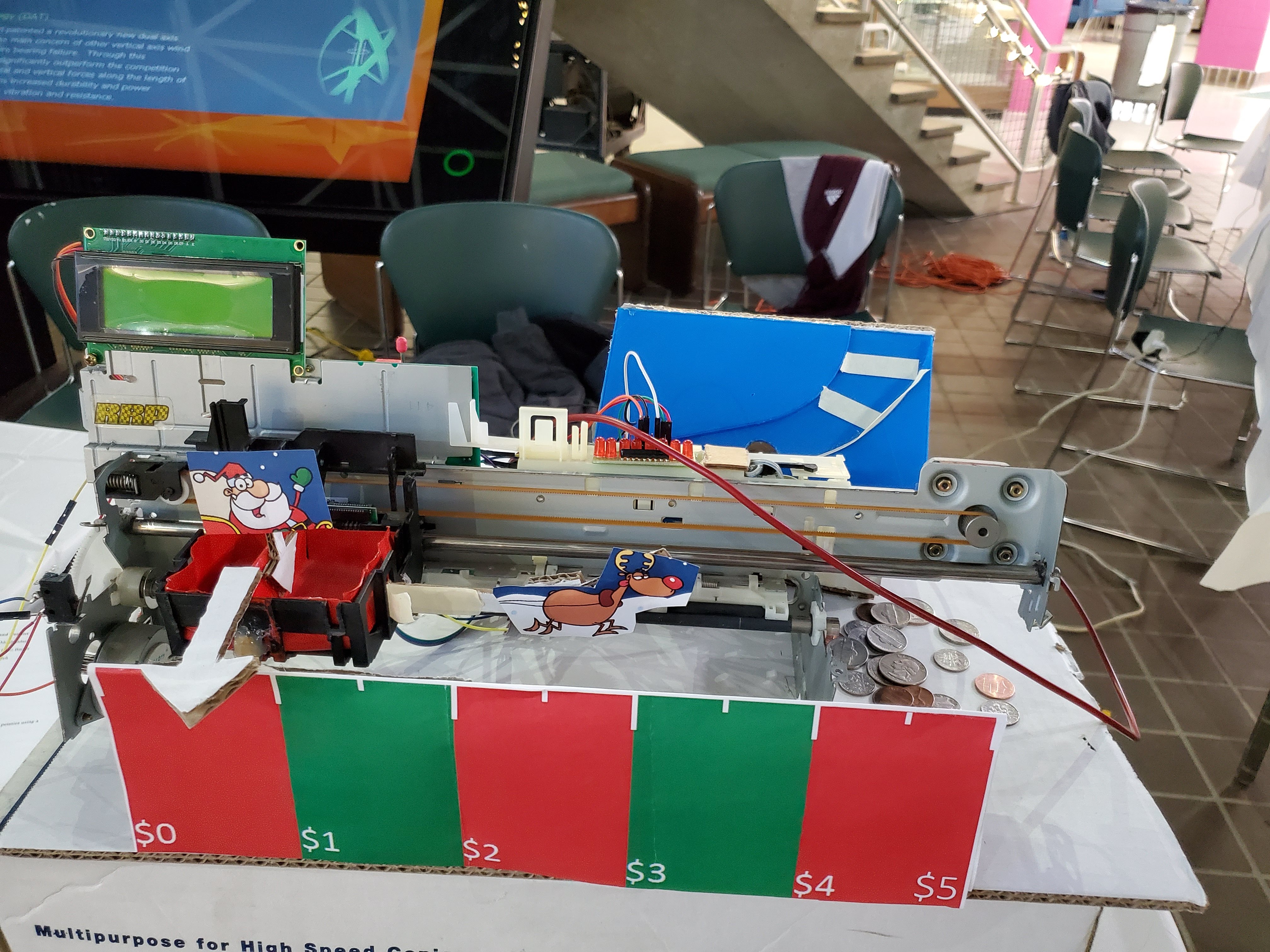
Worked within a team of 3 people (software engineer and electrical engineer) to design, program, and manufacture a power supplied coin sorter/counter using different electronic and mechanical parts such as Arduino board, photo resistors, 3D printed coin sorter, and stepper motor. I was in charge of the mechanical design and manufacturing of our assembly. By communicating with my teammates, I also made sure all the electronic parts work in sync with the mechanical parts to guarantee a functioning final product. As an outcome of this project, I learned how to collaborate with other engineers of different fields to deliver a final product given a deadline.